ロボットシステムコース
未来のロボット 未来の社会を支える
~ロボットや自動化システムの設計・開発を担う技術者をめざす~
機械システム、電子回路、プログラミング等のメカトロニクス系の基礎技術からはじまり、高機能・高付加価値を実現する自動化機械やロボットを制御するためのより高度な技術習得へと段階的に学びます。学びの内容は、センサ、アクチュエータ、マイコン、ソフトウェア言語、自動化技術、知的制御などさまざまです。
機械・電子・情報を包括した、いわば未来の社会インフラを支えるためのインテグレーション技術を習得するためのコースです。

1年~2年次
興味・得意分野をみつけ
コース選択へとつながる基礎力を身につける
ICT応用および演習を通じて、プログラム作成の基礎を習得します。さらにメカトロニクス技術の要素技術習得をめざし、機械システム、センサ技術、メカトロニクスおよび実験などの授業に取り組みます。
興味のあることを探す
1年次:主な授業
- 工学基礎および実験 I
- 工学基礎および実験 II
インターンシップ→得意分野をみつけコースを選択する
2年次:主な授業
- 機械システムとメカニズム
- メカトロニクスおよび実験
- 電気電子技術および実験
- ICT応用および演習

3年~4年次
コース配属は3年次から
高度な授業内容で専門性を習得する
3年次からはロボット開発者または自動化システム開発者をめざして、自動制御、組込みシステム、ロボット技術、知能化技術など各種の技術を統合できる開発力を養う科目が用意されています。
ロボットシステムコース配属→就職活動開始
3年次:主な授業
- C言語応用
- 自動化技術および実験
- 自動制御および実験
- 画像処理技術および実験
- 組込みシステム基礎・応用
- 生体工学
卒業研究開始→インターンシップ→卒業
4年次:主な授業
- セミナーⅠ
- セミナーⅡ
- ものづくりCAE応用
- 知能化技術


教員メッセージ

ビチャイ サェチャウ
教授・工学博士

球体ロボット
一から設計・製作し、最後までやり遂げる達成感を!
~未来の社会インフラを支える技術者を育てる~
これまで日本は、産業用ロボット市場で世界をリードしてきました。製造業分野を中心に産業用ロボットの開発・導入が進み、ロボット先進国と言われた時代もあります。 しかしながら、世界的に多様なロボットが開発されている現在、今や、産業用ロボットよりも大きな市場が広がっています。その一例として、掃除ロボットをはじめとする家庭用ロボット、サービスロボット、農業用ロボット、医療ロボット、アシストロボット、介護ロボット、自動運転等を実現する移動ロボット、宇宙ロボット、癒しロボット、軍事用ロボットなどが挙げられます。
今後、日常のあらゆるところでロボットが介在していくものと思いますが、その背景にはハードウェアやソフトウェア、センシング技術など、ロボットを研究・開発する条件が整っていることがあると考えています。開発や普及が一層進む中、生物の種類に匹敵するほど多種多様なロボットが誕生する可能性があります。
このような時代の変化に対応するため、総合機械学科の「ロボットシステムコース」では、ロボットや自動化システムの設計・開発を担う技術者を養成するカリキュラムを展開していきます。
ロボットはさまざまな要素技術により成り立つものです。まず、機械工学、制御工学、電気工学を融合させたメカトロニクス。この基礎知識は、従来どおりしっかり教えていきます。また、IoTやAI、ビッグデータなどを組み込み、各種技術を統合できる開発力を養う科目も用意されています。
専門科目では、「アクチュエータ技術および実験」「C言語応用」「IoT技術および実験」の授業を新たに導入しました。従来から継続する授業もロボットや自動化システムの設計・開発に結びつくものとして、内容を拡充していきます。
そして、さまざまな実習でこれらを体験的に学び、技術を身につけることも大きな特長です。講義で知識を習得するだけでなく、実際に工作機械を使い、一からハードウェアを設計・製作し、ソフトウェアを組み込み、制御。開発プログラムを活かしたものづくりを、チームで業務分担しながら行っていきます。
ものづくりは頭を使って考えるだけでなく、行動に移すことが大事です。行動するにはハードルが高いと感じる時もありますが、ものつくり大学にはハードルを乗り越え、思うままにチャレンジできる製作環境が整備されています。また、トライ&エラーの連続もありますが、チームで取り組むことによって仲間と共に問題解決したり、お互いの能力を補い合うといった経験を積むことができます。
このような経験が実社会のさまざまな場面で役立つことを願い、教員一同、実践的な学びの場を提供するとともに、最終的にものづくりの達成感や喜びを味わってもらいたいと考えています。本学での学びを通じて、何かをやり遂げた!という実感を持ち、どんな局面でも前向きに取り組める、創造力豊かな技術者を世に送り出したいと思っています。
ピックアップカリキュラム
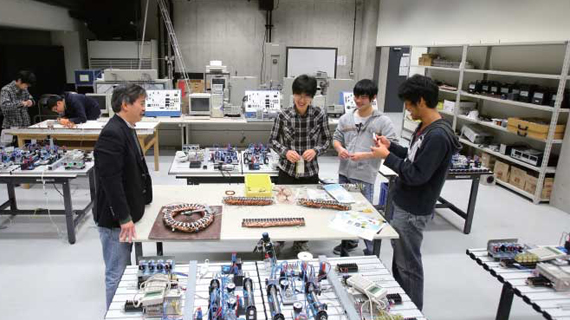
電気機器および実験
電気機器システムの基礎と応用技術を習得し、コア付きにリニアモータの設計・製作を通して、電磁現象により動作する電気機器の仕組みを実践的に学びます。
組込みシステム応用および実習
ロボット開発に不可欠な組込みシステム技術を本格的に学びます。マイコンへのプログラミング、ロボットカーを製作し、走行を制御する実習課題に取り組みます。
我々の暮らしになくてはならない存在となっているコンピュータネットワークの仕組みとその機能について解説するとともに実験を通して理解してもらいます。コンピュータネットワークに関する知識を養い、コンピュータネットワークを使いこなせるようになります。
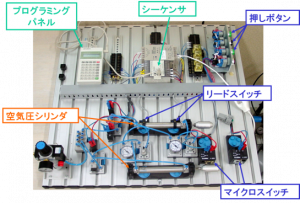
自動制御の考えに基づいて、電子技術(情報処理)と機械技術(動作するメカニズム)を融合させたメカトロニクス技術は,ロボットをはじめとする自動機器や各種の自動化システム開発の基本です。この授業では、条件によって機器の動作を自動的に切り替えるシーケンス制御の理論と実践方法を学びます。
実験では、実際の工場の自動生産システムでも使用されているセンサ、アクチュエータとシーケンス制御の要であるPLC(シーケンサ)という制御装置を用い、仮想的な自動化システムの制御を行うことで、シーケンス制御の理論を理解すると共に、制御システムの構築法と動作制御のためのPLCプログラムの作成法を習得します。
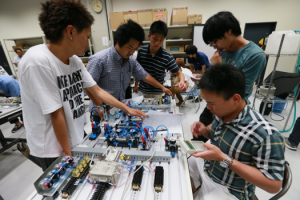
「基礎電気工学」「デジタル回路の設計・製作」などの授業で得られた知識を活かし、システム開発に不可欠な組込みシステム技術を本格的に学びます。全8回の授業の前半はマイコンへのプログラミング、後半ではロボットカーを製作し、走行を制御する実習課題に取り組みます。
組込みシステムを開発するためのプログラミング能力を習得するとともに、ソフトウェアやハードウェアを実際に動作させる経験により、課題解決の達成感や感動を味わい、問題解決能力を養います。
これ以降、より高度な技術を習得するための授業を履修し、実践的なスキルと技術者としての創造力を高めていきます。
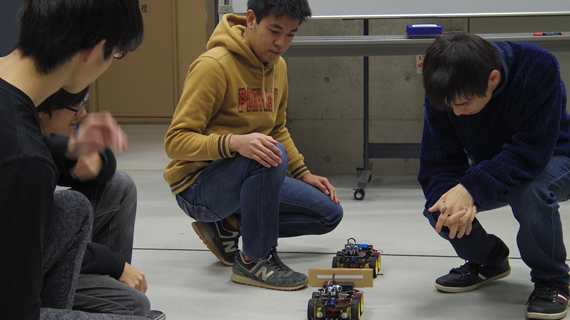
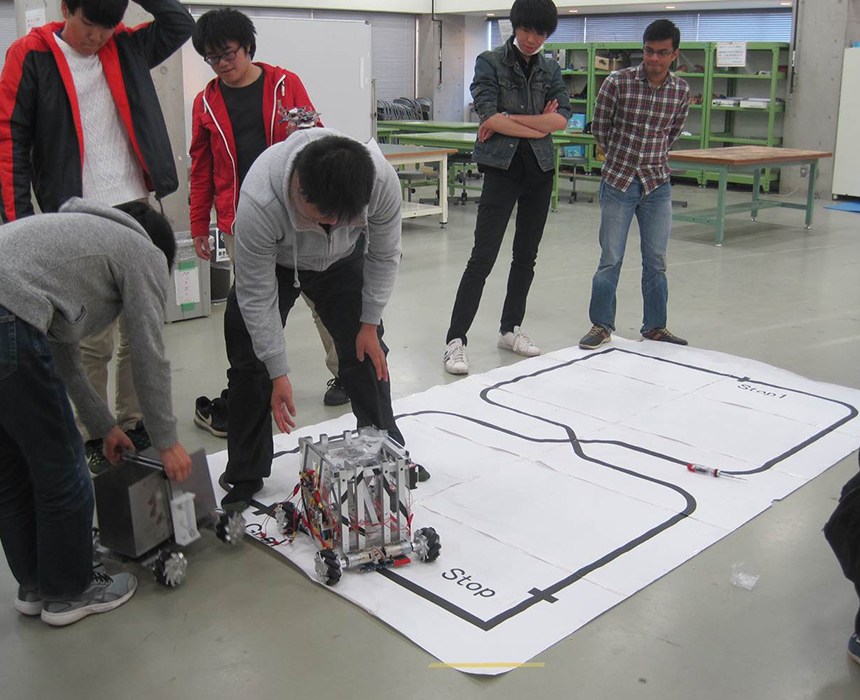
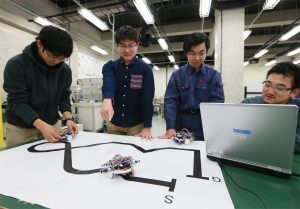
ロボットカーの追尾制御 動画
授業内容
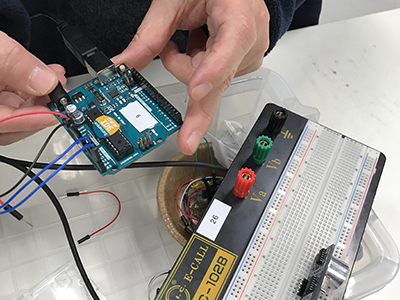
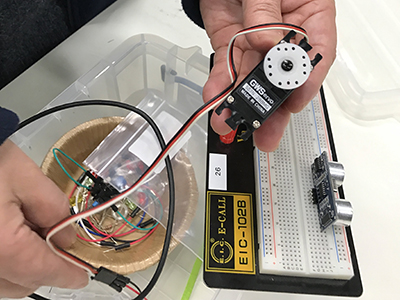
全8回の授業の前半は、簡単な電子回路の設計・製作やサーボモータの制御などを学び、電子工作の面白さや魅力を改めて体感します。
【実習課題:ロボットカーの製作・制御】
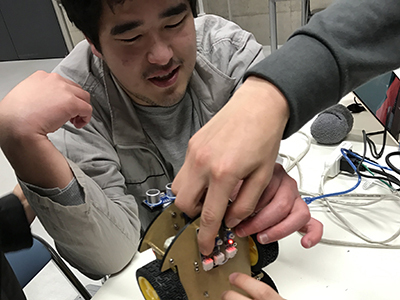
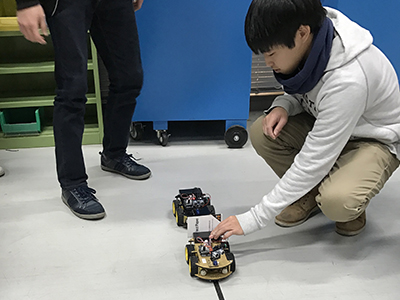
授業の後半は、市販のキットを活用し、グループ単位で1台のロボットカーを製作。グループで組み立てやプログラミング、検証などの作業を分担します。 ロボットカーは障害物を自動的に回避して走行させるのが一般的ですが、この授業では先生がプログラムした先頭車に車間距離20cmで学生のロボットカーが追尾するという課題に取り組みます。先頭車は加速や減速、停止をするため、モータやセンサをどう制御するかが問われます。 走行試験は5回行い、測定ラインで車間距離20cmをキープできると合格判定となります。
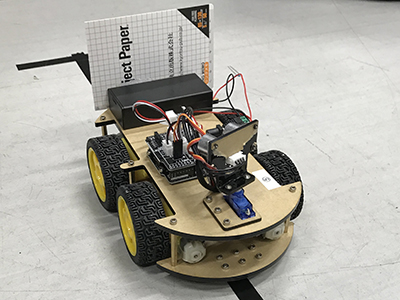
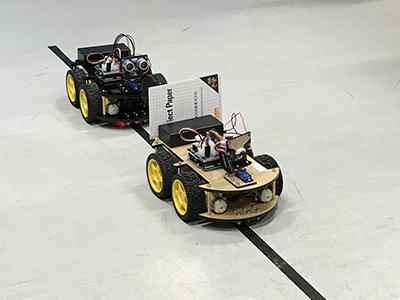
ロボットカーの前方には距離をセンシングする超音波センサ、下部には車線を認識する赤外線センサが搭載されています。ブレーキは付いていないため、減速や停止は車輪を逆回転させるプログラムを実行します。これらを制御しながら、課題に取り組みます。

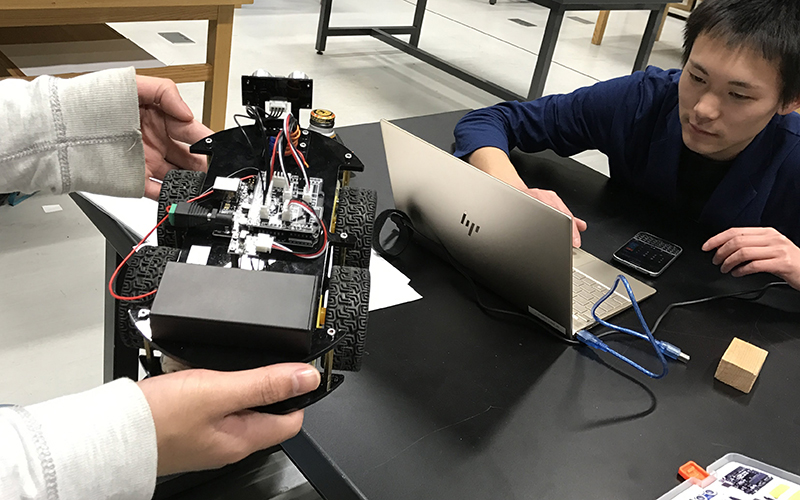
「一定のスピードで走行し、先頭車が停止すると、こちらも停止するプログラムを入れています。黒のラインを真っ直ぐに走ればよいのですが、試験走行では少し右に曲がっていってしまいました。黒のラインから右側にずれるのを検知したら、少し左に曲がるようプログラムを修正し、結果として真っ直ぐに走るようにしています。先頭車との車間距離を念頭に置き、速度も調整しています」

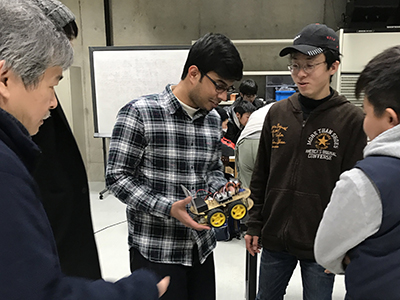
先生は質問されたら、ヒントを与えるのみ。どこに問題があるか分かっていますが、敢えて教えません。問題を自ら発見して、解決した方が今後につながると、あたたかく見守ります。
1回目の走行では課題達成ならず。何が問題か自分たちで考え、プログラムの修正や試験走行を何度も行います。赤外線センサの反応も確認します。
成功した学生のコメント

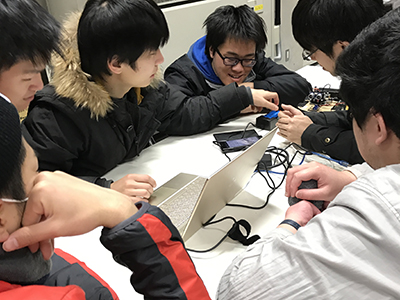
「1回目の走行では車間距離が20cmより大きく開いたので、2回目はスピードを速めるプログラムの調整をしました。3回目はアクセルの数値を変更しました。みんなでいろいろ考え、3回目に成功することができました!」
「車間距離が20cmになると、走行から停止のプログラムに切り替わるようにしていましたが、精度の問題で18cmや15cmで停止してしまいました。プログラムの数値を変更し、実際に20cmで停止するよう修正。例えば、数値を1変えたらどうなるか。幾つか試してみて、何回か走らせてみて、その様子でこのぐらいと決めて、成功しました。とても楽しかったです!」
どのグループも試行錯誤を繰り返し、プログラムの検証・調整を行った結果、5回以内で合格という課題を全員クリアすることができました。
電気機器システムの基礎と応用技術を習得し、実験・実習を通して、電磁現象により動作する電気機器の仕組みを体験的に学びます。
実習ではコア付きリニアモータを製作。一からリニアモータを製作するのは、ものつくり大学ならではの特色です。1、2年次に学んだ「機械工作」等の知識を活かしながら、グループで製作に取り組み、社会で必要となるチームワーク力も養います。また、動作実験によりモータの原理への理解を深めます。
知識と実体験を融合させた一連の学びによって、電気機械器具製造業や、輸送用機械器具製造業、なかでも世界的な普及が進む電気自動車製造で不可欠な知識を体得していきます。
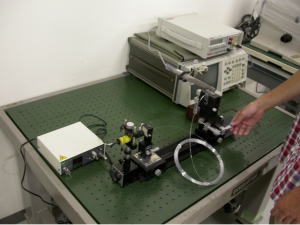
リニアモータ動画
【実習課題:コア付きリニアモータの製作】
製作過程
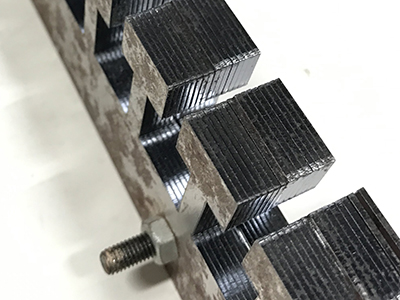
25枚の鉄板を重ねたコア。実習ではグループ単位で1つのリニアモータを製作します。レーザー加工機を使用し、コア素材の鉄板を切断するところからスタート。正確に切り出した鉄板を一枚一枚重ねていきます。
続いて、エナメル線を導線に使用し、基板に巻いていきます。
コイルをはんだ付けで接合。配線も学生が行います。複雑ながらも、授業で学んだ理論が分かれば難しくはありません。グループで協力してコイルをつないでいきます。
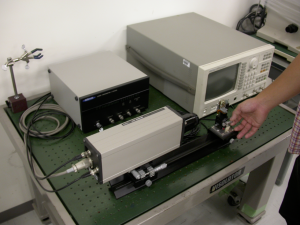
学生が製作したリニアモータ

コイルの輪の大きさや巻く回数、つけ方なども、学生が自ら考えます。密に巻いたり、巻数が多いほど、電磁石の磁力が強まります。限られた時間の中でどう作るかは各グループの腕の見せどころです。
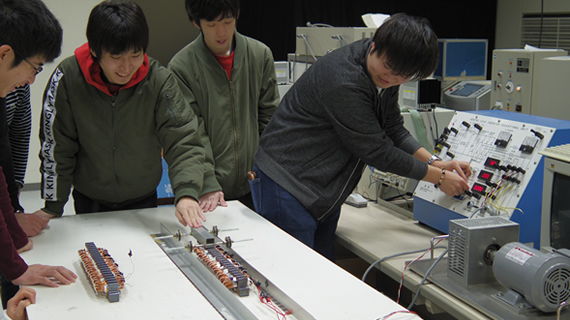
各グループのリニアモータが完成後、動作実験を行います。電流を流すと磁場が発生し、リニアモータが動く仕組みと、電圧や周波数の変化により生じる現象を確認。授業で学んだ内容をリアルに理解することができます。
一番綺麗にコイルを巻いたグループ


「コイルを巻く時はスロットに絶縁紙を敷いて、漏電には注意を払いました。コイルが上に出ると見栄えが悪いと思い、下に回してつなぐようにしました。基板を裏返してはんだ付けを行ったので、その作業が難しかったですが、完成した時は嬉しかったです。実際にちゃんと動いてくれて、良かったと思いました!」
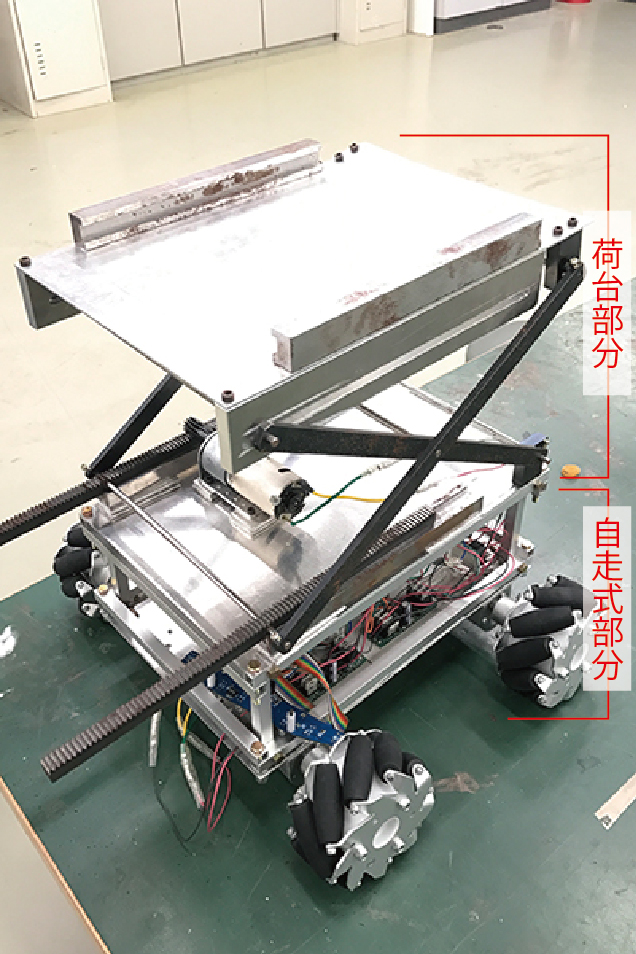
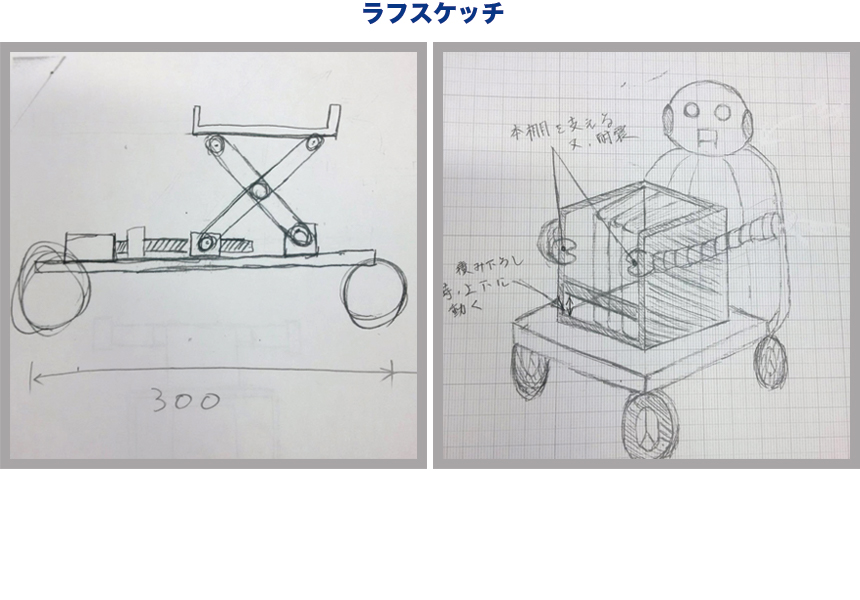
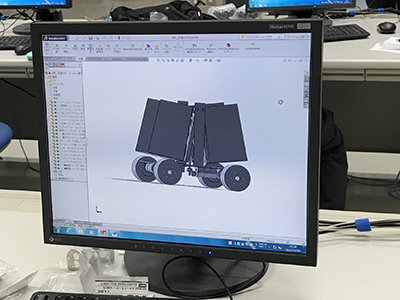
ロボットの要素技術、基本的な設計・製作手法など「ロボット技術および実験Ⅰ」で習得した知識を活かし、図書館の蔵書を運搬する自走式ロボットをグループ単位で製作します。
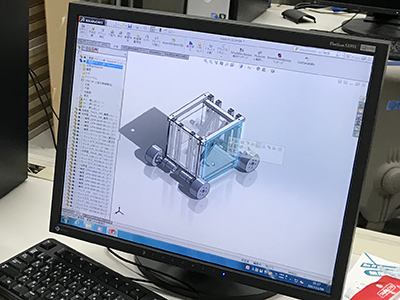
企画立案、アイデアスケッチ、設計・製図、部品の選定、加工、組み立て、プログラミング、動作実験、成果の発表に至るまで、一連のプロセスを体験的に学習。各グループは設計・加工・プログラムの班に分かれ、プロジェクトとして製作に取り組みます。実用的なロボットの設計・製作技術を学びながら、社会で必要となるチームワーク力も養います。
また、本授業では「機械工作および実習」「制御技術および実験」「3次元CAD実習」など、1、2年次に学んだ加工、コンピュータ制御、設計等の知識を集大成し、実務に役立てられる技能へと転換。これ以降、より高度な技術を習得する授業を履修することで、ロボットや自動制御に関する専門知識を深め、実践的なスキルを身につけます。
【学生が企画・設計・製作したロボット】
各グループは設計・加工・プログラムの班に分かれ、全体スケジュールを念頭に置きながら、製作に取り組みます。いつも一緒にいる仲間だからこそ、お互いの適性を把握しており、協力して一つのものを創り上げていきます。
B班
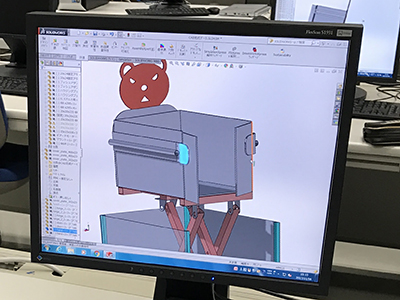
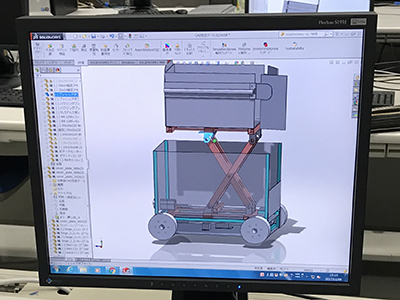
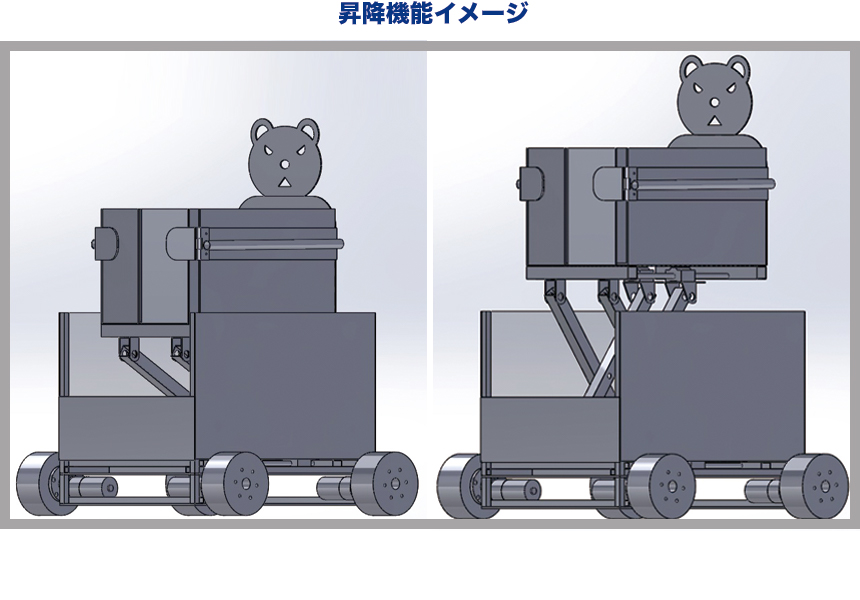
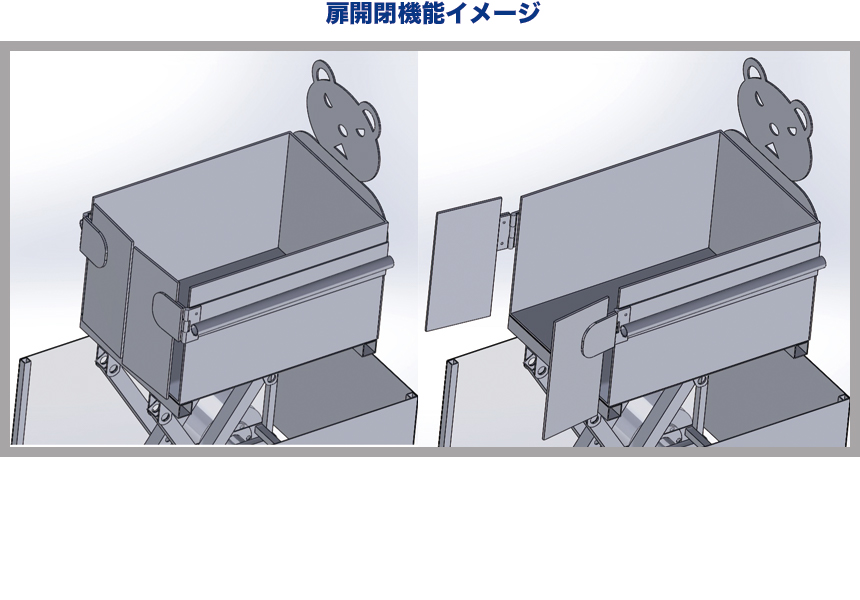
CAD図に色付けをして、進捗状況を確認。全体の進行を見ながら、最終授業で発表するプレゼンテーション資料(パワーポイント)も作成します。 「モーター1つの簡単な構造で、荷台を上下させられるように設計しました。台車に使われる構造と同じなので、強度があると思います。荷台にはクマのデザイン要素を入れ、手にあたる部分には扉を配置しました。扉が開閉することで本が取り出しやすく、落ちない工夫をしています。A4判の本が縦向き、横向きのどちらでものせられる寸法で考えました」

加工班は、溶接やはんだ付けなどによって、さまざまなパーツの組み立てを行います。

金属板など材料の角の出っ張りを取る“バリ取り”は、ものづくりに必要不可欠な加工。バリ取りをすることで、美しく仕上がり、安全な製品になります。

「このような形状は、勢いよくバリ取りをすると、へこみができやすいんです。1、2年次に習ったやすりの使い方のコツを思い出しながら、弱めの力で少しずつ削るようにしています」
加工・製作したさまざまなパーツを一つひとつ組み立てていきます。加工手順も自ら考え実践することで、ものづくりの一連の流れを体得し、今後の設計・製作へと結びつける貴重な経験となります。
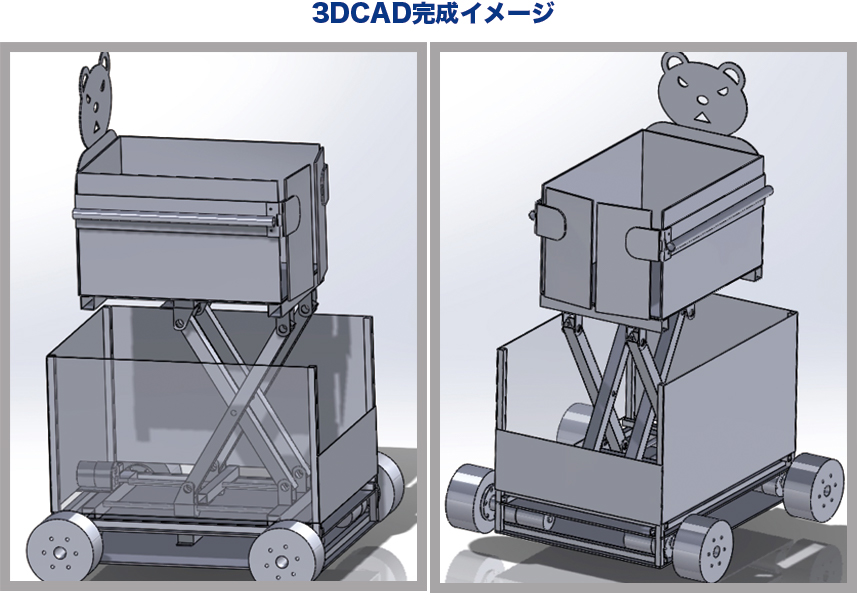
完成したロボット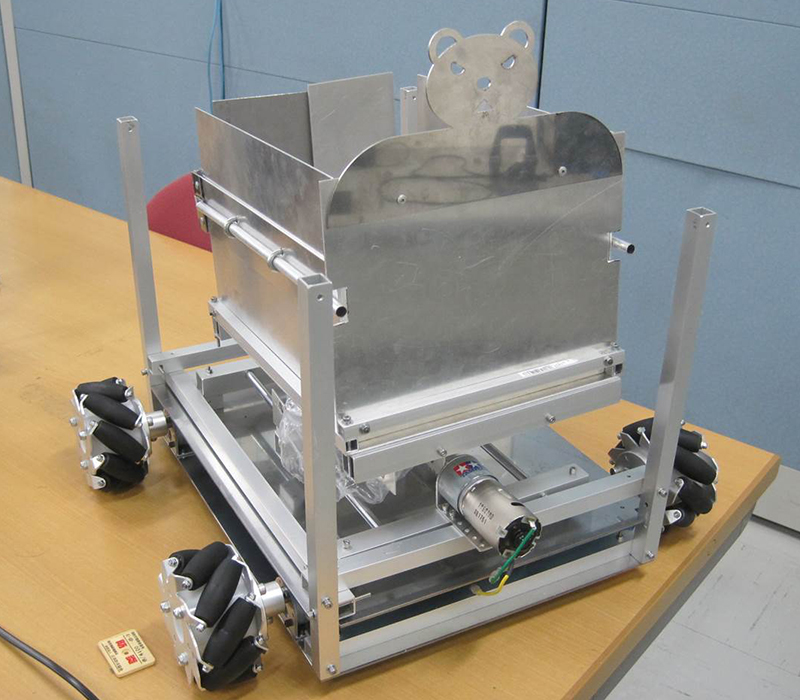
本の出し入れがしやすい昇降機能、落下防止機能に、使う人に親しみやすさを与える要素も盛り込んだ自走式ロボットが完成しました!
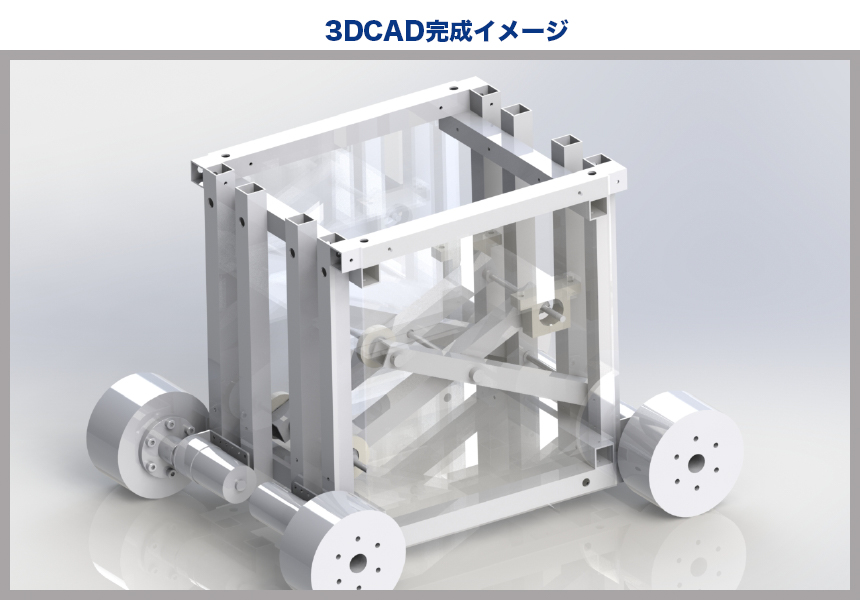
D班
「小型の車をイメージし、荷台部分はボックス型の形状にしました。ボックスの中に本を入れられ、のせた本の重さで、底面が下がるようになっています。本の判型は小さめで設定したため、たくさん本をのせることで底面が下がるのではないかと思います」
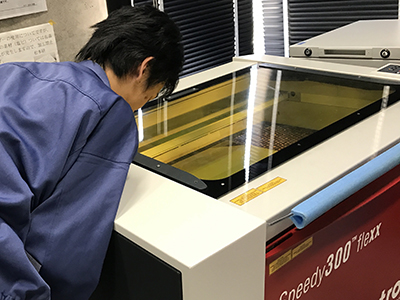
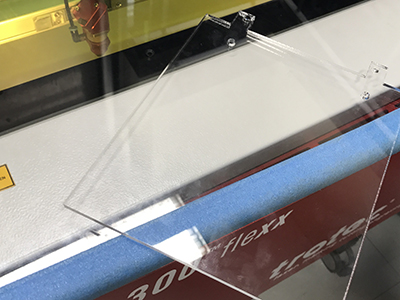
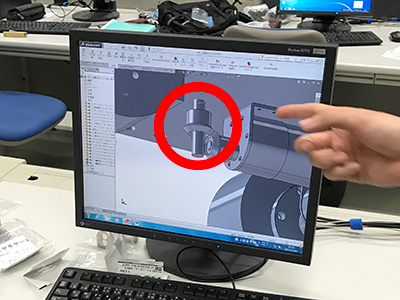
ボックスのパーツとなるアクリル板は、レーザー加工機でカット。レーザー光でさまざまな素材のカットや彫刻ができるため、製作の幅が広がります。
ボックス(アクリル板)の別面。加工室では他メンバーがフレームを加工しています。ボックス部分のパーツが揃い、いよいよ組み立てに取り掛かります。
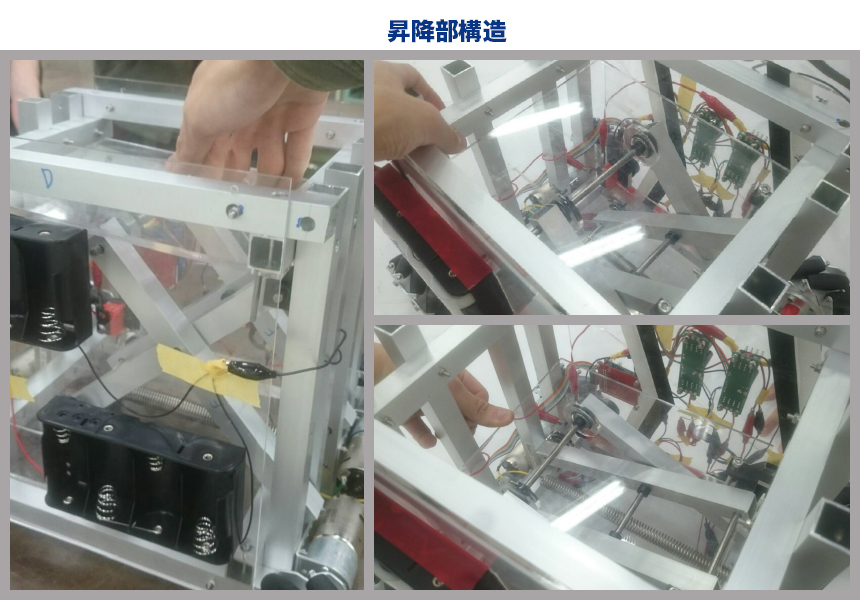
昇降部は、軸間に引張りバネを張り、上向きの力を発生させることで上昇する構造です。85mm上下します。
完成したロボット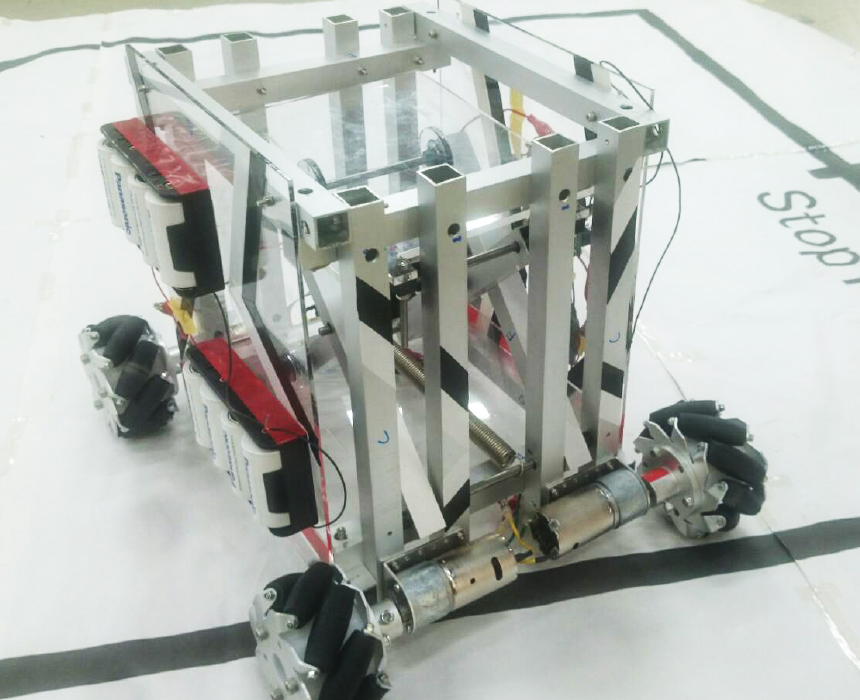
スムーズに動作する駆動部や、生産効率(加工・製作のしやすさなど)を加味しながら、本の出し入れがしやすい昇降機能を盛り込んだ自走式ロボットが完成しました!
完成後、設計どおり動作するか実験を行い、結果を評価します。得られた結果や製作プロセスでの問題点を振り返り、今後のロボット設計・製作へとつなげていきます。
C班
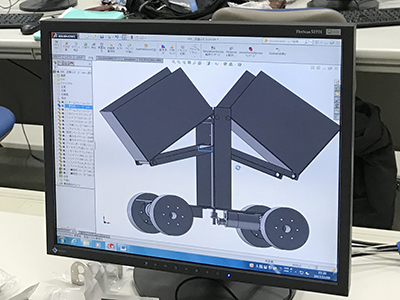
「走行時はこのような状態ですが、本を置いたり、取り出したりする時に荷台が傾斜するように工夫しました。動力伝達に傘歯車(かさはぐるま)を使用し、内蔵された天板が上下するように設計しています。A4判の本が5冊ほどのせられる想定で考えています」
傘歯車を2つ組み合わせ、回転させることで、シャフトに動力が直角に伝達。天板を上げたり下ろしたりすることができます。
ロボット技術および実験Ⅰ,Ⅱは3年生の1学期および3学期におこなっている授業で、ロボットの基礎的な設計・製作技術を学びます。
前半のロボット技術および実験Ⅰでは、ロボットの構造や動作のメカニズム、動きの元となるモータなどの駆動原、動きをとらえるセンサなど基本的な要素について学びます。まず、グループ単位でマイクロマウスを用いた自律動作が可能な小型ロボットを組み立てます。それを用い、各要素について動作テスト等をおこないます。さらに、コンピュータによる簡単な動作の制御技術についても学習します。
ロボット技術および実験Ⅱでは、Iで学んだことを生かし、より実用的なロボットシステムの設計・製作をおこないます。具体的には図書館の蔵書管理ロボットのなどをグループで製作をします。これらを通じて、機構の設計ノウハウやプログラミング技術を習得します。



 各種お問い合わせページ
各種お問い合わせページ アクセス
アクセス